

01、Model-based(基于模型的方法)
这种方法很好理解,即知道要抓什么,事先采用实物扫描的方式,提前将模型的数据给到机器人系统,机器在实际抓取中就只需要进行较少的运算:
1. 离线计算:根据搭载的末端类型,对每一个物体模型计算局部抓取点;
2. 在线感知:通过RGB或点云图,计算出每个物体的三维位姿;
3. 计算抓取点:在真实世界的坐标系下,根据防碰撞等要求,选取每个物体的最佳抓取点。
RGB颜色空间由红绿蓝三种基本色组成,叠加成任意色彩,同样地,任意一种颜色也可以拆解为三种基本色的组合,机器人通过颜色坐标值来理解“颜色”。这种方式与人眼识别颜色的方向相似,在显示屏上广泛采用。

02、Half-Model-based(半模型的方法)
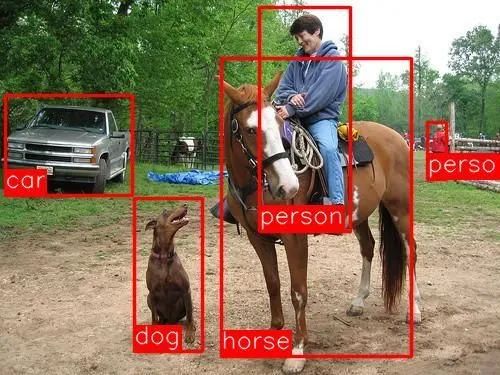
在这种训练方式中,不需要完全预知抓取的物体,但是需要大量类似的物体来训练算法,让算法得以在物品堆中有效对图像进行“分割”,识别出物体的边缘。这种训练方式,需要这些流程:
1.离线训练图像分割算法,即把图片里的像素按物体区分出来,此类工作一般由专门的数据标注员来处理,按工程师的需求,标注出海量图片中的不同细节;
2.在线处理图像分割,在人工标注出的物体上,寻找合适的抓取点。
这是一种目前应用较为广泛的方式,也是机械臂抓取得以推进的主要推力。机械臂技术发展缓慢,但计算机视觉的图像分割则进展迅速,也从侧面撬动了机器人、无人驾驶等行业的发展。
这种训练方式不涉及到“物体”的概念,机器直接从RGB图像或点云图上计算出合适的抓取点,基本思路就是在图像上找到Antipodal(对映点),即有可能“抓的起来”的点,逐步训练出抓取策略。
 咨询微信
咨询微信